
搜索结果: 1-15 共查到“知识库 计算机仿真”相关记录965条 . 查询时间(2.203 秒)

哈尔滨工程大学计算机科学与技术学院科研成果系列发布(第四十九期)。
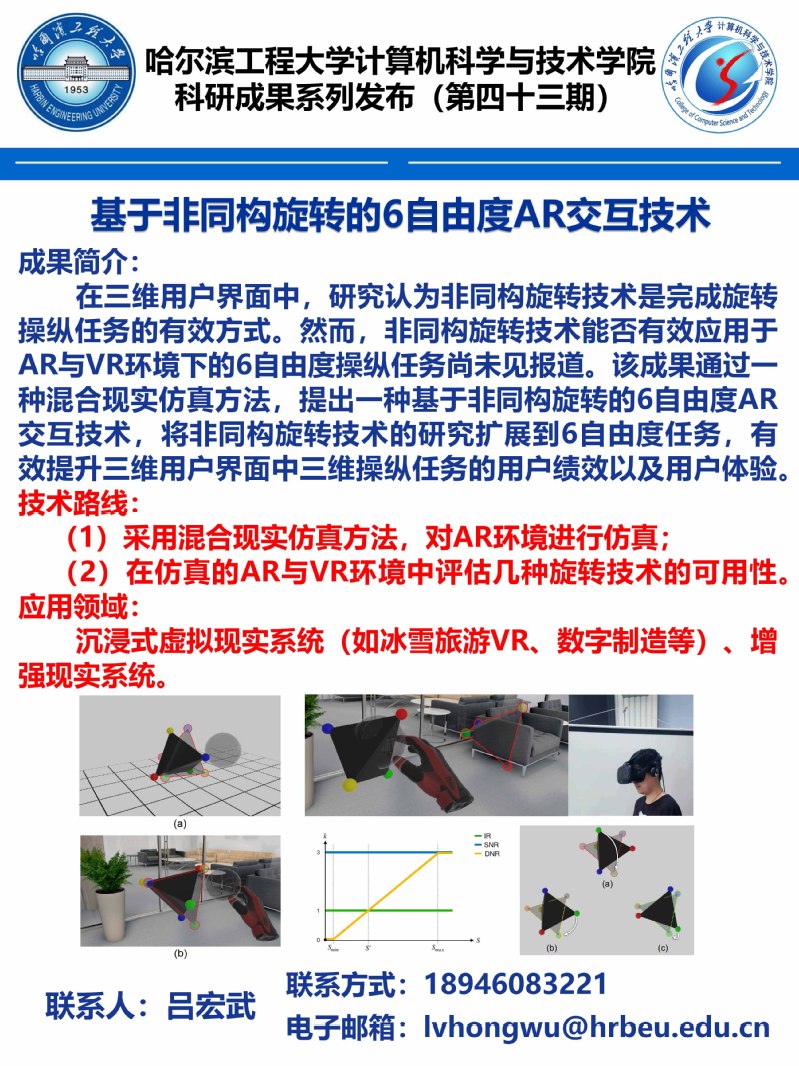
哈尔滨工程大学计算机科学与技术学院科研成果系列发布(第四十三期)。
2022年山东大学软件学院博士招生团队简介――人机交互与虚拟现实团队
山东大学软件学院 博士 招生团队 人机交互与虚拟现实团队 人机交互 虚拟现实
2022/12/19
山东大学软件学院人机交互与虚拟现实团队有30多年的发展历史,研究方向包括CAD与图形学、媒体计算、自然交互、虚拟现实与增强现实等。深入研究了群体交互和投影交互、视频-图形的无缝融合、高精度三维建模、高度真实感渲染、海量媒体数据分析与计算等关键技术;开发了真实感动漫渲染、特效影院、海量数字媒体管理和服务、支持动画协同设计的云服务等软件和系统,并在数字内容创意产业得到广泛应用;团队先后承担了国家重点研...

哈尔滨工程大学计算机科学与技术学院科研成果系列发布(第二十二期)。

基于信息系统的体系作战仿真系统
信息系统 体系作战 仿真系统 Agent 理论
2016/10/11
仿真是研究基于信息系统的体系作战能力的一种重要手段。对基于信息系统体系作战的基本特征和体系 作战能力的生成机理进行了分析,运用Agent 的建模和仿真理论,提出一种基于信息系统的体系作战仿真系统。建 立了仿真模型的基本构架,设计了具有三层结构的仿真系统框架,实现了对体系作战的各种复杂的作战行动的建模 和对不确定作战环境进行充分的探索分析。分析证明,该仿真系统结构合理,并且具有多方面应用。
基于URWPGSim2D平台协作过孔项目的策略优化
2D仿真机器鱼 协作过孔 策略优化
2016/10/17
为提高2D 仿真协作过孔比赛项目中仿真鱼的智能程度和稳定性,提出“仿真鱼的智能纠错”和“多顶球策 略交替协作”2 个方案。将比赛全程分为“无球”和“带球”2 个阶段,分别对这2 个阶段的传统策略进行介绍,详细 阐述其优化策略,并分别对其进行实验验证。实验结果表明:2 条仿真鱼交替协作完成比赛,其智能程度有很大提升, 优化后的策略能充分考虑该项目的得分要求和场地特点,在速度和稳定性上都有较大程度的提...
多方位测量的相位双差GNSS欺骗干扰检测算法
载波相位双差 GNSS欺骗干扰检测 方位变化 天线阵
2016/7/13
对于二元天线阵,相位双差检测算法的载波相位双差角度模糊、虚警概率较高,这限制了算法的应用。针对这一问题,提出天线阵方位变化的欺骗干扰检测算法。通过二元天线阵在不同方位估计信号的载波相位双差,进行多次判决,有效消除角度模糊,降低检测的虚警概率,实现二元天线的载波相位双差检测。建立仿真模型,并通过仿真计算分析验证了该方法的有效性。
Pyramid Management and Real-time Visualization of Massive 3-Dimensional Terrain Data
Visualization Level of Detail Computer Vision Simulation Geography
2015/12/3
3-Dimensional terrain visualization has been widely used in the fields, such as games, geographic information system (GIS), remote sensing (RS) and virtual reality (VR). Rendering large scale 3D terra...
弹形变化对超音速下弹丸气动特性的影响
弹丸 混合网格 弹形变化 气动特性
2016/7/25
通过建立小口径弹丸三维模型,采用混合网格划分方法,运用工程流体软件进行了弹丸外流场数值仿真,并对仿真计算的准确性进行了验证。以某5.8 mm枪弹为基础,改变弹丸外形,弧形部和尾锥部尺寸,计算得到弹丸超音速飞行状态下不同气动力参数,研究弹形变化对其气动特性的影响规律,结果表明:弹形各部分尺寸变化对气动力影响不同,弧形部较尾锥部影响更加明显,而尾锥长度比尾锥角的影响更大。
对称边界条件下轨道炮有限元/边界元仿真
轨道炮 有限元 边界元 对称边界条件
2016/7/25
基于deal.ii编写了电磁轨道炮有限元仿真程序,建立了拉格朗日运动坐标下电磁轨道炮的有限元仿真模型;通过使用有限元边界元耦合方法可以对电磁轨道炮的边界条件进行计算,而无需对轨道炮周边的空气划分网格,是一种处理电磁场边界问题的有效方法;但是,由于边界元方法,使用的是满秩矩阵,在三维情况下计算量大,利用轨道炮的对称性,使用对称边界条件,减少了参与计算的网格数目,从而减少计算量。
机器鱼2D仿真抢球博弈策略
机器鱼 2D 仿真 抢球博弈 策略
2016/10/13
针对机器鱼2D 仿真平台更新,抢球博弈场地的变更和规则的改变问题,对抢球博弈策略进行新的规划。 介绍抢球博弈项目的比赛场地和比赛规则,利用仿真机器鱼鱼体的多个部位和仿真场地的特殊性运输目标物体,并 进行多次实验验证。实验结果表明:新策略能充分考虑比赛场地的地形、机器鱼以及得分情况等实时信息,在不同 的区域、不同的得分的情况下执行不同的策略,加强机器鱼的运输和绕障能力,在快速得分的同时又能灵活应变。
基于高斯算法的小行星固定时间拦截
轨道模型 固定时间拦截 高斯算法
2016/7/25
为了防止未来有小行星撞击地球,想要对小行星实施固定时间拦截;首先根据给定的地球与小行星的撞击点位置以及小行星与地球撞击点的速度,建立小行星的轨道模型;利用小行星与地球的轨道模型预推出拦截卫星发射点的位置,再利用高斯算法建立卫星的固定时间拦截轨道模型,并计算卫星发射速度,以及碰撞后小行星的速度;最后,对所建立的模型进行数值仿真。仿真结果表明:若地球将与小行星发生碰撞,则拦截卫星将按拦截轨道运行固定时...
基于URWPGSim2D仿真平台的测试分析与策略改进
URWPGSim2D 仿真 软件测试 策略
2016/10/13
为了在国际水中机器人比赛的URWPGSim2D 仿真平台中更准确地控制仿真鱼,通过对该平台进行测试 分析以完善比赛策略,基于对平台的测试,总结分析平台特性和仿真鱼的行为规律,依此提出花样游泳项目竞技策 略的改进方案。结果表明:结合平台分析结果改进后的策略可更有效地控制仿真鱼行为,使仿真鱼的行进过程更加 快速稳定,从而在花样游泳比赛取得冠军成绩。